Robôs Industriais
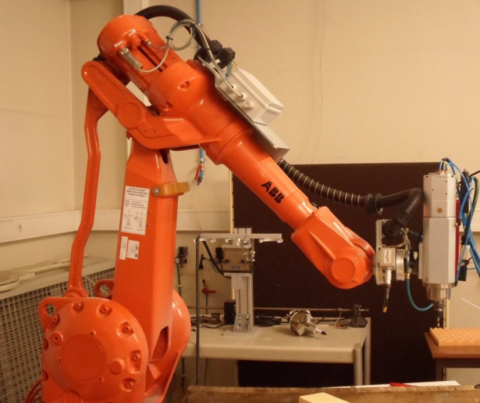
Os trabalhos desenvolvidos em robótica industrial podem ser divididos em duas fases. A primeira compreende a aplicação de técnicas de controle de força para uso em robôs manipuladores adaptados para operações de furação. O maior desafio, neste caso, reside em encontrar soluções via software que possibilitem um controle acurado de força e posição numa mesma direção de avanço. Clique aqui para obter o relatório do projeto final de curso apresentado na Universidade Federal Fluminense ou aqui para obter o relatório publicado pela Universidade do Porto, no âmbito de mestrado integrado. O presente trabalho gerou diversas publicações, com destaque ao paper apresentado no XXIII ABCM International Congress of Mechanical Engineering (veja aqui) e posteriormente no Journal of the Brazilian Society of Mechanical Sciences and Engineering (veja aqui). A segunda fase do trabalho compreende a otimização dos torques empregados pelo controlador do robô. O desafio agora é descobrir as melhores posições e orientações em que o robô pode executar uma trajetória sem ter que para isso gerar torques elevados ou ainda buscando maior acurácia ou menor tempo para execução das tarefas. Os trabalhos relacionados a este segundo objetivo podem ser conferidos aqui.